FAQ
Audio-/Videodatei publizieren
14: Echtzeitsysteme, Vorlesung, SS 2019, 11.06.2019
Autor
Thomas Längle, Christoph Ledermann
Herausgeber
Beteiligtes Institut
Institut für Anthropomatik und Robotik (IAR)
Genre
Beschreibung
- 0:00:00 Start
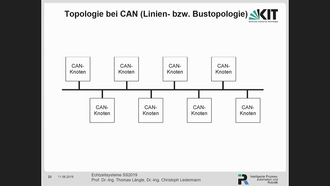
- 0:00:05 Topologie bei CAN (Linien- bzw. Bustopologie)
- 0:06:27 Dominante 0 und Rezessive 1
- 0:11:28 Arbitrierung bei CAN
- 0:15:45 Aufbau eines CAN Telegrams
- 0:27:16 Eigenschaften des CAN-BUS (CAN-Basisprotokoll)
- 0:33:10 Schematische Darstellung des CANopen Gerätmodells
- 0:38:52 Zuordnung von Objekten, Funktionscodes und Identifiern bei CANopen
- 0:51:01 Echtzeitkommunikation
- 1:00:24 Hamming-Distanz
- 1:12:04 Zusätzliche Übertragungsfehler
- 1:14:52 Teilredundante Hardware bei ""sicheren Teilnehmern"" nach SafetyBUS p
Laufzeit (hh:mm:ss)
01:24:48
Serie
Echtzeitsysteme, Vorlesung, SS 2019
Publiziert am
12.06.2019
Fachgebiet
Lizenz
Aufrufe
52
| Auflösung | 1280 x 720 Pixel |
| Seitenverhältnis | 16:9 |
| Audiobitrate | 128000 bps |
| Audio Kanäle | 2 |
| Audio Codec | aac |
| Audio Abtastrate | 48000 Hz |
| Gesamtbitrate | 504488 bps |
| Farbraum | yuv420p |
| Container | mov,mp4,m4a,3gp,3g2,mj2 |
| Medientyp | video/mp4 |
| Dauer | 5088 s |
| Dateiname | DIVA-2019-537_hd.mp4 |
| Dateigröße | 320.860.311 byte |
| Bildwiederholfrequenz | 25 |
| Videobitrate | 370386 bps |
| Video Codec | h264 |
Embed-Code
Echtzeitsysteme, Vorlesung, SS 2019
Folgen 1-27
von 27