FAQ
Audio-/Videodatei publizieren
02: Robotik II: Humanoide Robotik, Vorlesung, SS 2019, 06.05.2019
Herausgeber
Beteiligtes Institut
Institut für Anthropomatik und Robotik (IAR)
Genre
Beschreibung
- 0:00:00 Starten
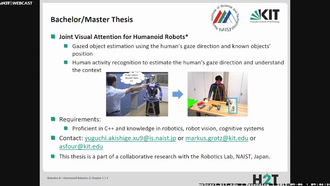
- 0:00:05 Bachelor / Master Thesis
- 0:04:50 Inhaltsverzeichnis
- 0:05:54 Geschichte der humanoiden Roboter
- 0:08:41 WABOT
- 0:09:56 Wabian
- 0:13:53 Andere Roboter aus Japan
- 0:17:45 HRP
- 0:27:25 ASIMO
- 0:33:34 Toyota Partner Roboter
- 0:37:19 Sony SDR und QRIO
- 0:38:21 Cog
- 0:40:17 Robonaut
- 0:43:35 Petman
- 0:46:36 Boston Dynamics
- 0:54:27 Sarcos
- 0:55:42 iCub
- 0:58:00 Nano
- 1:02:16 KHR & HUBO
- 1:03:39 Dexter & uBot
- 1:04:26 Justin & Toro
- 1:05:04 ARMAR
- 1:07:32 DARPA Robotics Challenge
- 1:15:53 Team IHMC Robotics
- 1:16:02 Team MIT
- 1:16:25 Team RoboSimian
- 1:17:26 Team Tartan Rescue
- 1:17:54 Team THOR
- 1:18:04 Team TRACLabs
- 1:18:55 Team TROOPER
- 1:19:00 Team ViGIR
- 1:19:09 Biomechanical Models of the Human Body
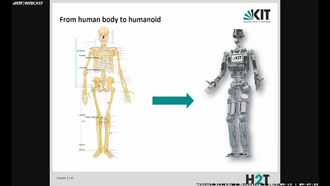
- 1:20:24 From human body to humanoid
- 1:22:17 Use cases for models of the human body
- 1:24:37 Human body model
- 1:27:16 Master Motor Map (MMM)
- 1:12:47 ARMAR with Leaders
Laufzeit (hh:mm:ss)
01:32:49
Serie
Robotik II: Humanoide Robotik, Vorlesung, SS 2019
Publiziert am
06.05.2019
Fachgebiet
Lizenz
Aufrufe
234
| Auflösung | 1280 x 720 Pixel |
| Seitenverhältnis | 16:9 |
| Audiobitrate | 128000 bps |
| Audio Kanäle | 2 |
| Audio Codec | aac |
| Audio Abtastrate | 48000 Hz |
| Gesamtbitrate | 933739 bps |
| Farbraum | yuv420p |
| Container | mov,mp4,m4a,3gp,3g2,mj2 |
| Medientyp | video/mp4 |
| Dauer | 5569 s |
| Dateiname | DIVA-2019-312_hd.mp4 |
| Dateigröße | 649.996.506 byte |
| Bildwiederholfrequenz | 25 |
| Videobitrate | 799644 bps |
| Video Codec | h264 |
Mediathek-URL
Embed-Code
Robotik II: Humanoide Robotik, Vorlesung, SS 2019
Folgen 1-10
von 10