FAQ
Audio-/Videodatei publizieren
08: Robotik II: Humanoide Robotik, Vorlesung, SS 2019, 24.06.2019
Autor
Herausgeber
Zentrum für Mediales Lernen (ZML)
Beteiligtes Institut
Institut für Anthropomatik und Robotik (IAR)
Genre
Beschreibung
- 0:00:00 Start
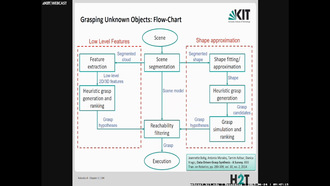
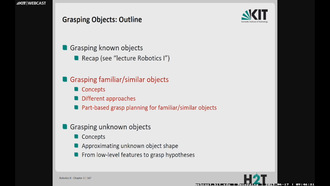
- 0:00:08 heutiges Thema: Greifen von unbekannten Objekten
- 0:01:10 Detecting and Shape Completion Using Symmetry
- 0:04:31 Shape completion
- 0:06:19 Finding symmetry planes
- 0:09:16 Object shape completion
- 0:11:48 From Low-Level Features to Grasp Hypotheses
- 0:17:42 ECV based EGA
- 0:34:03 Training Data for Grasping
- 0:43:53 Deep learning approaches for grasping
- 0:48:59 Grasp hypothesis generation and scoring
- 0:52:56 Generative approach
- 0:56:58 Deep Grasping
- 1:08:40 Post Processing
- 1:11:10 Evaluation
- 1:15:56 Discriminative approach
- 1:20:52 Heat map based approach
Laufzeit (hh:mm:ss)
01:26:58
Serie
Robotik II: Humanoide Robotik, Vorlesung, SS 2019
Publiziert am
25.06.2019
Fachgebiet
Lizenz
Aufrufe
332
| Auflösung | 1280 x 720 Pixel |
| Seitenverhältnis | 16:9 |
| Audiobitrate | 128000 bps |
| Audio Kanäle | 2 |
| Audio Codec | aac |
| Audio Abtastrate | 48000 Hz |
| Gesamtbitrate | 933361 bps |
| Farbraum | yuv420p |
| Container | mov,mp4,m4a,3gp,3g2,mj2 |
| Medientyp | video/mp4 |
| Dauer | 5218 s |
| Dateiname | DIVA-2019-571_hd.mp4 |
| Dateigröße | 608.837.599 byte |
| Bildwiederholfrequenz | 25 |
| Videobitrate | 799265 bps |
| Video Codec | h264 |
Mediathek-URL
Embed-Code
Robotik II: Humanoide Robotik, Vorlesung, SS 2019
Folgen 1-10
von 10