06: Robotik II: Humanoide Robotik, Vorlesung, SS 2019, 03.06.2019
Author
Editor
Zentrum für Mediales Lernen (ZML)
Participating institute
Institut für Anthropomatik und Robotik (IAR)
Genre
Description
- 0:00:00 Start
- 0:00:05 Implementation of synergies in Robotics
- 0:05:58 Mechanical implementation of hand synergies
- 0:12:10 How to actuate a vector multiple?
- 0:15:45 How to mecanically add two vector quantities?
- 0:17:43 Putting everything together
- 0:20:05 The TUAT/Karlsruhe Humanoid Underactuated Hand
- 0:33:31 The KIT prosthetic hand
- 0:39:49 Embedded System
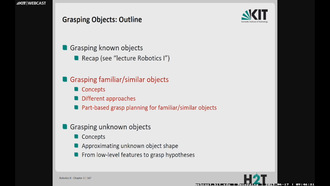
- 0:54:23 Grasping Objects: Outline
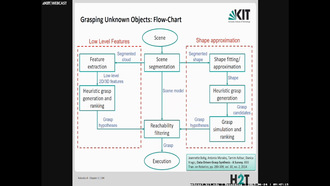
- 0:56:26 Grasping Known Objects: Typical Flow-Chart
- 1:03:01 KIT Object database
- 1:04:30 Grasp Simulator - Simox
- 1:15:51 Grasping Familiar Objects: Concept
- 1:21:19 Grasping Familiar / Similar Objects: Approaches
- 1:24:39 Discriminative Approaches: Flow-Chart
Duration (hh:mm:ss)
01:28:23
Series
Robotik II: Humanoide Robotik, Vorlesung, SS 2019
Published on
04.06.2019
Subject area
License
| Resolution | 1280 x 720 Pixel |
| Aspect ratio | 16:9 |
| Audio bitrate | 128000 bps |
| Audio channels | 2 |
| Audio Codec | aac |
| Audio Sample Rate | 48000 Hz |
| Total Bitrate | 933918 bps |
| Color Space | yuv420p |
| Container | mov,mp4,m4a,3gp,3g2,mj2 |
| Media Type | video/mp4 |
| Duration | 5303 s |
| Filename | DIVA-2019-509_hd.mp4 |
| File Size | 619.054.056 byte |
| Frame Rate | 25 |
| Video Bitrate | 799822 bps |
| Video Codec | h264 |
Media URL
Embed Code
Robotik II: Humanoide Robotik, Vorlesung, SS 2019
Episodes 1-10
of 10