Automotive Vision / Fahrzeugsehen, Vorlesung, SS 2019

Autor
Genre
Beschreibung
Hintergrund:
Die sensorielle Erfassung und Interpretation der Umwelt bilden die Grundlage für die Generierung intelligenten Verhaltens. Die Fähigkeit zu Sehen eröffnet Fahrzeugen völlig neuartige Perspektiven. Fahrerassistenzsysteme mit der Fähigkeit ihre Umgebung wahrzunehmen bilden entsprechend ein steil aufstrebendes Forschungs- und Innovationsfeld der Automobiltechnik. Viele Experten sind sich einig darüber, dass die Fähigkeit zu Sehen Fahrzeuge der nahen Zukunft maßgeblich beeinflussen wird wie kaum ein zweites Forschungsgebiet in diesem Bereich. Erste so genannte Fahrerassistenzsysteme konnten bereits respektierliche Verbesserungen hinsichtlich Komfort, Sicherheit und Effizienz erzielen. Bis Automobile jedoch über eine dem menschlichen visuellen System vergleichbare Leistungsfähigkeit verfügen, werden voraussichtlich noch einige Jahrzehnte intensiver Forschung erforderlich sein.
Ziele:
Die Vorlesung richtet sich an Studenten des Maschinenbaus und benachbarter Studiengänge, die interdisziplinäre Qualifikation erwerben möchten. Sie vermittelt einen Überblick über das Gebiet Fahrzeugsehen von elementaren Verfahren der Kamerabildauswertung bis hin zu innovativen messtechnischen Methoden für sehende Fahrzeuge. Die Herleitung messtechnischer Methoden der Bildverarbeitung wird anhand aktueller, praxisrelevanter Anwendungsbeispiele vertieft und veranschaulicht.
Lehrinhalt:
1. Fahrerassistenzsysteme
2. Stereosehen
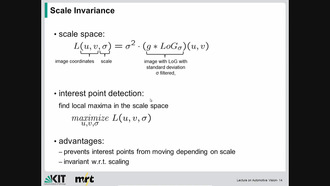
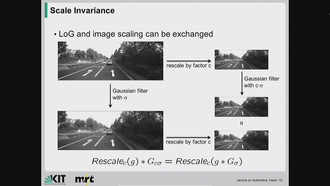
3. Merkmalspunktverfahren
4. Optischer Fluss/Tracking im Bild
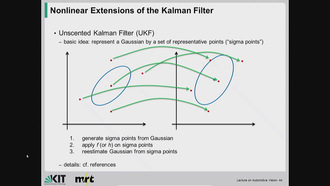
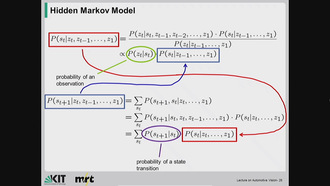
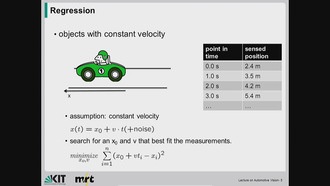
5. Tracking und Zustandsschätzung
6. Selbstlokalisierung und Kartierung
7. Fahrbahnerkennung
8. Verhaltenserkennung
Fachgebiet
Lizenz
Hinweis
Die Beiträge dieser Serie können Sie als Podcast abonnieren.
Embed-Code