FAQ
Audio-/Videodatei publizieren
07: Automotive Vision / Fahrzeugsehen, Vorlesung, SS 2019, 17.06.2019
Autor
Beteiligtes Institut
Fakultät für Maschinenbau (MACH)
Institut für Mess- und Regelungstechnik mit Maschinenlaboratorium (MRT)
Genre
Beschreibung
- 0:00:00 Start
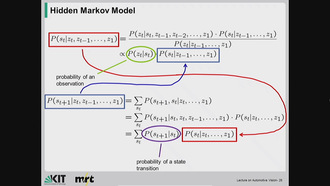
- 0:00:07 Hidden Markov Model
- 0:04:04 Iterative Process
- 0:29:37 General Case
- 0:32:39 Special Case: linear Gaussian models
- 0:50:26 Kalman Filter
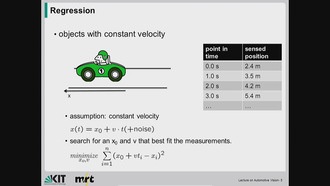
- 1:10:11 Linear regression
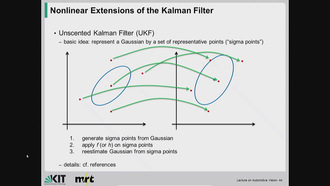
- 1:17:12 Nonlinear Extensions of the Kalman Filter
- 1:18:51 Extended Kalman filter (EKF)
- 1:23:12 Unscented Kalman Filter (UKF)
Laufzeit (hh:mm:ss)
01:28:01
Serie
Automotive Vision / Fahrzeugsehen, Vorlesung, SS 2019
Publiziert am
17.06.2019
Fachgebiet
Meß- und Regelungstechnik, Instrumentenkunde
Lizenz
Aufrufe
76
| Auflösung | 1280 x 720 Pixel |
| Seitenverhältnis | 16:9 |
| Audiobitrate | 128000 bps |
| Audio Kanäle | 2 |
| Audio Codec | aac |
| Audio Abtastrate | 48000 Hz |
| Gesamtbitrate | 348559 bps |
| Farbraum | yuv420p |
| Container | mov,mp4,m4a,3gp,3g2,mj2 |
| Medientyp | video/mp4 |
| Dauer | 5281 s |
| Dateiname | DIVA-2019-546_hd.mp4 |
| Dateigröße | 230.074.507 byte |
| Bildwiederholfrequenz | 25 |
| Videobitrate | 214457 bps |
| Video Codec | h264 |
Mediathek-URL
Embed-Code
Automotive Vision / Fahrzeugsehen, Vorlesung, SS 2019
Folgen 1-12
von 12