FAQ
Audio-/Videodatei publizieren
08: Automotive Vision / Fahrzeugsehen, Vorlesung, SS 2019, 24.06.2019
Autor
Beteiligtes Institut
Fakultät für Maschinenbau (MACH)
Institut für Mess- und Regelungstechnik mit Maschinenlaboratorium (MRT)
Genre
Beschreibung
- 0:00:00 Start
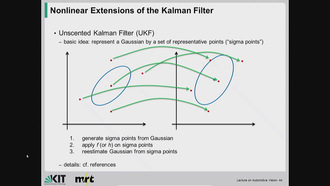
- 0:00:05 Nonlinear Extensions of the Kalman Filter
- 0:03:08 Example: Determine Ego Motion Visually
- 0:27:36 Non-Gaussian Models
- 0:30:01 Numerical Representation
- 0:41:38 Particle Filter
- 1:05:12 Particle Filter with Resampling
- 1:06:32 Comparison of Filters
- 1:13:15 Summary
Laufzeit (hh:mm:ss)
01:15:22
Serie
Automotive Vision / Fahrzeugsehen, Vorlesung, SS 2019
Publiziert am
25.06.2019
Fachgebiet
Lizenz
Aufrufe
62
| Auflösung | 1280 x 720 Pixel |
| Seitenverhältnis | 16:9 |
| Audiobitrate | 128000 bps |
| Audio Kanäle | 2 |
| Audio Codec | aac |
| Audio Abtastrate | 48000 Hz |
| Gesamtbitrate | 807646 bps |
| Farbraum | yuv420p |
| Container | mov,mp4,m4a,3gp,3g2,mj2 |
| Medientyp | video/mp4 |
| Dauer | 4522 s |
| Dateiname | DIVA-2019-575_hd.mp4 |
| Dateigröße | 456.488.364 byte |
| Bildwiederholfrequenz | 25 |
| Videobitrate | 673549 bps |
| Video Codec | h264 |
Mediathek-URL
Embed-Code
Automotive Vision / Fahrzeugsehen, Vorlesung, SS 2019
Folgen 1-12
von 12