FAQ
Audio-/Videodatei publizieren
11: Robotik I - Einführung in die Robotik, Vorlesung, WS 2017/18, 20.11.2017
Autor
Herausgeber
Beteiligtes Institut
Institut für Anthropomatik und Robotik (IAR)
Genre
Beschreibung
- 0:00:00 Starten
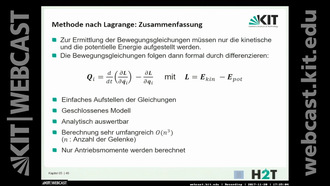
- 0:00:10 Methode nach Lagrange: Zusammenfassung
- 0:02:38 Inhalt
- 0:03:05 Methode nach Newton-Euler: Grundprinzip
- 0:06:07 Methode nach Newton-Euler: Verkettung
- 0:08:10 Methode nach Mewton-Euler: Vorwärtsgleichungen
- 0:11:47 Methode nach Mewton-Euler: Rückwärtsgleichungen
- 0:19:14 Methode nach Mewton-Euler: Zusammenfassung
- 0:21:14 Methode nach Mewton-Euler: Eigenschaften
- 0:23:35 Regelung von Robotersystemen
- 0:24:52 Inhalt
- 0:27:03 Regelungstechnik
- 0:30:57 Aufbau und Wirkungsweise einer Regelung
- 0:35:15 Prinzip der Lösung:
- 0:36:07 Aufbau einer Regelung
- 0:48:11 Wirkungsweise der Regelung
- 0:49:39 Beispiel: Lenkung eines Automobils als Regelung
- 0:51:45 Regelung
- 0:52:26 Beispiel: Drehzahlregelung eines Gleichstrommotors
- 0:56:08 Beispiel: ARMAR-4
- 1:01:36 Einführung - Regelkreis
- 1:02:46 Beispiel ARMAR-4
- 1:03:06 Einführung - Struktur eines Regelkreises
- 1:03:22 Grundlagen der Regelung
- 1:03:33 Geschwindigkeitsregelung
- 1:05:20 Vorsteuerung
- 1:05:57 Grundlagen der Regelung
- 1:06:05 Laplace- Transformation
- 1:24:50 Impulsefunktion (Dirac - Impuls)
- 1:25:43 Einheitssprungfunktion
- 1:29:20 Laplace - Transformation: Regeln
Laufzeit (hh:mm:ss)
01:32:41
Serie
Robotik I - Einführung in die Robotik, Vorlesung, WS 2017/18
Publiziert am
23.11.2017
Fachgebiet
Lizenz
Aufrufe
217
| Auflösung | 1280 x 720 Pixel |
| Seitenverhältnis | 16:9 |
| Audiobitrate | 123634 bps |
| Audio Kanäle | 2 |
| Audio Codec | aac |
| Audio Abtastrate | 48000 Hz |
| Gesamtbitrate | 929621 bps |
| Farbraum | yuv420p |
| Container | mov,mp4,m4a,3gp,3g2,mj2 |
| Medientyp | video/mp4 |
| Dauer | 5561 s |
| Dateiname | DIVA-2017-680_hd.mp4 |
| Dateigröße | 4.096 byte |
| Bildwiederholfrequenz | 25 |
| Videobitrate | 799891 bps |
| Video Codec | h264 |
Mediathek-URL
Embed-Code
Robotik I - Einführung in die Robotik, Vorlesung, WS 2017/18
Folgen 1-28
von 28