FAQ
Audio-/Videodatei publizieren
20: Robotik I - Einführung in die Robotik, Vorlesung, WS 2017/18, 08.01.2018
Autor
Herausgeber
Beteiligtes Institut
Institut für Anthropomatik und Robotik (IAR)
Genre
Beschreibung
- 0:00:00 Starten
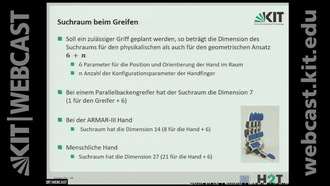
- 0:00:11 Suchraum beim Greifen
- 0:04:00 Objektklassen für das Greifen
- 0:14:38 Aktuelle Algorithmen zur Griffsynthese
- 0:18:02 Griffsynthese durch Vorwärtsplanung
- 0:26:40 Griffqualität (Kraftschluss-Metrik)
- 0:29:17 Grasp Wrench Space
- 0:31:37 Zufalllsbasierte Vorwärts-Greifplanung
- 0:40:17 Griffsynthese auf Objektteilen
- 0:47:39 Greifplanung mit Formprimitiven
- 0:51:21 Greifen bekannter Objekte: Ein Box-basierter Ansatz
- 0:55:57 Decomposition Algorithm
- 1:00:51 Erzeugen von Griffhypothesen: Von Boxen zu Griffen
- 1:02:39 Evaluation
- 1:07:00 Evaluation auf ARMAR-III
- 1:13:18 Greifplanung mit Superquadriken
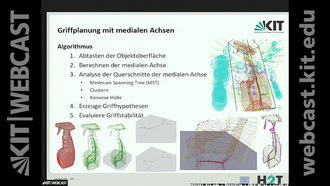
- 1:17:04 Griffplanung mit Medialen Achsen
Laufzeit (hh:mm:ss)
01:27:35
Serie
Robotik I - Einführung in die Robotik, Vorlesung, WS 2017/18
Publiziert am
11.01.2018
Fachgebiet
Lizenz
Aufrufe
310
| Auflösung | 1280 x 720 Pixel |
| Seitenverhältnis | 16:9 |
| Audiobitrate | 128000 bps |
| Audio Kanäle | 2 |
| Audio Codec | aac |
| Audio Abtastrate | 48000 Hz |
| Gesamtbitrate | 934080 bps |
| Farbraum | yuv420p |
| Container | mov,mp4,m4a,3gp,3g2,mj2 |
| Medientyp | video/mp4 |
| Dauer | 5255 s |
| Dateiname | DIVA-2018-14_hd.mp4 |
| Dateigröße | 613.598.489 byte |
| Bildwiederholfrequenz | 25 |
| Videobitrate | 799982 bps |
| Video Codec | h264 |
Mediathek-URL
Embed-Code
Robotik I - Einführung in die Robotik, Vorlesung, WS 2017/18
Folgen 1-28
von 28