19: Robotik I - Einführung in die Robotik, Übung, WS 2017/18, 18.12.2017
Author
Editor
Participating institute
Institut für Anthropomatik und Robotik (IAR)
Genre
Description
- 0:00:00 Starten
- 0:00:44 Greifplanung - Aufgaben
- 0:01:55 Aufgabe 1: Reibungsdreiecke
- 0:04:01 Kontaktmodelle
- 0:11:35 Kraftvektoren am Rand
- 0:19:18 Aufgabe 2: Grasp Wrensch Space
- 0:39:01 Aufgabe 3: Kraftgeschlossenheit
- 0:43:01 Greifmatrix in 3D
- 0:48:27 Linearer Spann (Lineare Hülle)
- 0:58:48 epsilon-Metrik
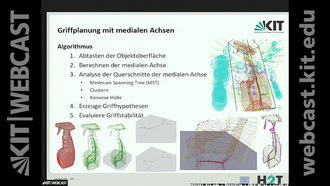
- 1:02:02 Aufgabe 3: Mediale Achsen
Duration (hh:mm:ss)
01:10:37
Series
Robotik I - Einführung in die Robotik, Vorlesung, WS 2017/18
Published on
19.12.2017
Subject area
License
| Resolution | 1280 x 720 Pixel |
| Aspect ratio | 16:9 |
| Audio bitrate | 123753 bps |
| Audio channels | 2 |
| Audio Codec | aac |
| Audio Sample Rate | 48000 Hz |
| Total Bitrate | 929749 bps |
| Color Space | yuv420p |
| Container | mov,mp4,m4a,3gp,3g2,mj2 |
| Media Type | video/mp4 |
| Duration | 4237 s |
| Filename | DIVA-2017-816_hd.mp4 |
| File Size | 4.096 byte |
| Frame Rate | 25 |
| Video Bitrate | 799906 bps |
| Video Codec | h264 |
Media URL
Embed Code
Robotik I - Einführung in die Robotik, Vorlesung, WS 2017/18
Episodes 1-28
of 28