FAQ
Audio-/Videodatei publizieren
16: Robotik I - Einführung in die Robotik, Übung, WS 2019/20, 16.12.2019
Autor
Herausgeber
Zentrum für Mediales Lernen (ZML)
Beteiligtes Institut
Institut für Anthropomatik und Robotik (IAR)
Genre
Beschreibung
- 0:00:00 Start
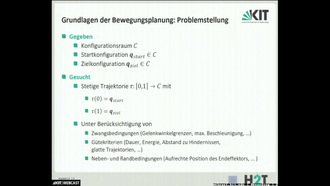
- 0:00:31 Aufgaben zur Bewegungsplanung
- 0:01:03 Aufgabe 1: Voronoi-Diagramme
- 0:01:42 Aufgabe 1.1: Voronoi-Begriffe
- 0:04:03 Aufgabe 1.2: Voronoi-Diagramm für P
- 0:13:27 Aufgabe 2: Linesweep-Verfahren
- 0:14:12 Aufgabe 2.1: Linesweep, Zellzerlegung
- 0:17:40 Aufgabe 2.2: Linesweep, Adjazenzgraph
- 0:19:07 Aufgabe 2.3: Linesweep, Pfad vom Start zum Ziel
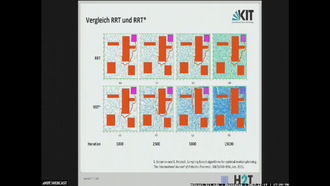
- 0:20:54 Aufgabe 3: RRT*
- 0:21:53 Aufgabe 3.1: Wie wurde q ermittelt?
- 0:25:02 Aufgabe 3.2: Pfadkosten
- 0:29:25 Aufgabe 3.3: RRT* Funktion
- 0:32:26 Aufgabe 3.4: Knoten für den Rewire-Schritt
- 0:33:12 Aufgabe 3.5: Rewire-Schritt
- 0:40:09 Aufgabe 4: A*-Algorithmus
- 0:45:05 Aufgabe 4.1: A*-Algorithmus
- 0:55:22 Aufgabe 4.2: A*-Algorithmus, Geeignete Heuristik
- 0:56:53 Aufgabe 4.3: A*-Algorithmus, Lösung
- 1:00:18 Aufgabe 5: Potentialfelder
- 1:03:19 Potentialfeld: Hindernis-Beispiel
- 1:04:46 Aufgabe 5.1: Abstoßende Potentiale
- 1:07:16 Aufgabe 5.2 Potential-Berechnung
- 1:08:11 Aufgabe 5.3: Richtung des Roboters
- 1:12:01 Praxisbeispiele
Laufzeit (hh:mm:ss)
01:18:59
Serie
Robotik I - Einführung in die Robotik, Vorlesung, WS 2019/20
Publiziert am
17.12.2019
Fachgebiet
Lizenz
Aufrufe
260
| Auflösung | 1280 x 720 Pixel |
| Seitenverhältnis | 16:9 |
| Audiobitrate | 128000 bps |
| Audio Kanäle | 2 |
| Audio Codec | aac |
| Audio Abtastrate | 48000 Hz |
| Gesamtbitrate | 934034 bps |
| Farbraum | yuv420p |
| Container | mov,mp4,m4a,3gp,3g2,mj2 |
| Medientyp | video/mp4 |
| Dauer | 4739 s |
| Dateiname | DIVA-2019-1006_hd.mp4 |
| Dateigröße | 553.266.494 byte |
| Bildwiederholfrequenz | 25 |
| Videobitrate | 800053 bps |
| Video Codec | h264 |
Mediathek-URL
Embed-Code
Robotik I - Einführung in die Robotik, Vorlesung, WS 2019/20
Folgen 1-26
von 26