FAQ
Audio-/Videodatei publizieren
18: Robotik I - Einführung in die Robotik, Vorlesung, WS 2019/20, 09.01.2020
Autor
Herausgeber
Zentrum für Mediales Lernen (ZML)
Beteiligtes Institut
Institut für Anthropomatik und Robotik (IAR)
Genre
Beschreibung
- 0:00:00 Start
- 0:01:35 Motivatiom - greifen
- 0:04:33 Die menschliche Hand
- 0:08:24 Komplexität des Problems reduzieren
- 0:10:18 Cutkosky Grifftaxonomie
- 0:17:48 Greifanalyse und Griffsynthese
- 0:24:52 Fingerspitzengriffmodell
- 0:27:20 Kontaktmodelle
- 0:30:23 Kontaktmodelle: Coulombsches Reibungsgesetz
- 0:33:00 Kontaktmodelle: geometrische Interpretation
- 0:36:13 Kontaktmodelle: Approximation des Reibungskegels
- 0:38:03 Stabilität eines Griffs
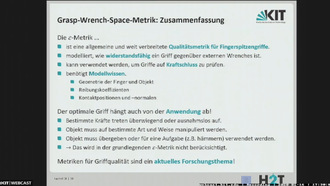
- 0:42:30 Wrench
- 0:46:24 Gleichgewichtsgriff: Beispiel
- 0:50:22 Kraftgeschlossene Griffe
- 1:03:00 Kraftgeschlossene Griffe: Beispiel in 2D
- 1:17:20 Greifmatrix
- 1:22:14 Formgeschlossene Griffe
- 1:24:43 Formgecschlossene Griffe: Beispiel in 2D
Laufzeit (hh:mm:ss)
01:26:19
Serie
Robotik I - Einführung in die Robotik, Vorlesung, WS 2019/20
Publiziert am
13.01.2020
Fachgebiet
Lizenz
Aufrufe
302
| Auflösung | 1280 x 720 Pixel |
| Seitenverhältnis | 16:9 |
| Audiobitrate | 128000 bps |
| Audio Kanäle | 2 |
| Audio Codec | aac |
| Audio Abtastrate | 48000 Hz |
| Gesamtbitrate | 933885 bps |
| Farbraum | yuv420p |
| Container | mov,mp4,m4a,3gp,3g2,mj2 |
| Medientyp | video/mp4 |
| Dauer | 5179 s |
| Dateiname | DIVA-2020-14_hd.mp4 |
| Dateigröße | 604.598.192 byte |
| Bildwiederholfrequenz | 25 |
| Videobitrate | 799931 bps |
| Video Codec | h264 |
Mediathek-URL
Embed-Code
Robotik I - Einführung in die Robotik, Vorlesung, WS 2019/20
Folgen 1-26
von 26