10: Robotik I - Einführung in die Robotik, Vorlesung, WS 2019/20, 25.11.2019
Author
Editor
Zentrum für Mediales Lernen (ZML)
Participating institute
Institut für Anthropomatik und Robotik (IAR)
Genre
Description
- 0:00:00 Start
- 0:01:43 Testfunktionen
- 0:05:15 Regelung von Manipulatoren
- 0:07:46 Gelenkregelung: Kaskadenregelung
- 0:11:16 Regelung im Gelenkwinkelraum
- 0:13:12 Regelung im kartesichen Raum
- 0:15:54 Struktur einer Roboterregelung
- 0:18:30 Regelungskonzepte für Manipulatoren
- 0:19:42 Kraft-Positionsregelung
- 0:21:18 Hybride Kraft-/ Positionsregelung
- 0:26:20 Impedanz-Regelung
- 0:28:35 Kraftbasierter Impedanzregler
- 0:29:27 Regelung bei ARMAR
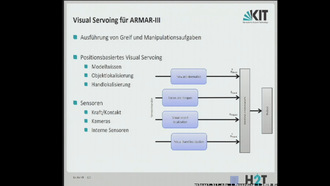
- 0:31:53 Ausführung von Manipulationsaufgaben
- 0:32:49 Bildbasierte Positionsregelung für das Greifen
- 0:33:31 Sensoren
- 0:34:14 Positionsbasiertes Visual Servoing
- 0:37:31 Sensorbasierte Ausführung von Manipulationsaufgaben
- 0:39:24 Kraftregelung
- 0:40:39 Zweiarmige Manipulation
- 0:43:14 Englische Begriffe
- 0:43:39 Bahnsteuerung
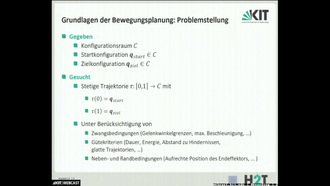
- 0:45:05 Grundlagen der Bahnsteuerung: Trajektorie
- 0:46:09 Grundlagen der Bahnsteuerung: Problem
- 0:46:58 Bahnsteuerung: Beispiel für ein Gelenk
- 0:48:03 Bahnsteuerung: Darstellung der Zustände
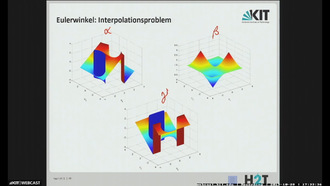
- 0:50:37 Bahnsteuerung: Interpolation
- 0:51:54 Bahnsteuerung im Konfigurationsraum
- 0:55:16 Bahnsteuerung im Arbeitsraum
- 0:56:49 Bahnsteuerung: Vor- und Nachteile der Darstellungen
- 0:58:49 Direkte Programmierung: Teach-In
- 1:01:24 Direkte Programmierung: Playback
- 1:07:07 Interpolationsarten: Überblick
- 1:09:07 Punkt-zu-Punkt-Steuerung (PTP)
- 1:14:01 Interpolation für PTP mit Rampenprofil
- 1:21:08 Zeitoptimale Bahn
- 1:22:15 Interpolation für PTP mit Sinoidenprofil
- 1:24:21 Interpolationsarten: Rampen- vs. Sinoidenprofil
- 1:25:29 Asynchrone und synchrone PTP-Bahnen
Duration (hh:mm:ss)
01:31:30
Series
Robotik I - Einführung in die Robotik, Vorlesung, WS 2019/20
Published on
26.11.2019
Subject area
License
| Resolution | 1280 x 720 Pixel |
| Aspect ratio | 16:9 |
| Audio bitrate | 128000 bps |
| Audio channels | 2 |
| Audio Codec | aac |
| Audio Sample Rate | 48000 Hz |
| Total Bitrate | 934041 bps |
| Color Space | yuv420p |
| Container | mov,mp4,m4a,3gp,3g2,mj2 |
| Media Type | video/mp4 |
| Duration | 5490 s |
| Filename | DIVA-2019-919_hd.mp4 |
| File Size | 641.016.824 byte |
| Frame Rate | 25 |
| Video Bitrate | 799988 bps |
| Video Codec | h264 |
Media URL
Embed Code
Robotik I - Einführung in die Robotik, Vorlesung, WS 2019/20
Episodes 1-26
of 26