09: Robotik I - Einführung in die Robotik, Vorlesung, WS 2018/19, 15.11.2018
Autor
Tamim Asfour, Peter Kaiser, Fabian Paus, Jonas Beil
Herausgeber
Beteiligtes Institut
Institut für Anthropomatik und Robotik (IAR)
Genre
Beschreibung
- 0:00:00 Start
- 0:00:13 Numerische Methoden
- 0:00:24 Jacobi-Matrix(Wdh.)
- 0:06:05 Differenzenquotiert
- 0:06:33 Umkehrung
- 0:07:32 Psedoinverse
- 0:09:23 Herleitung
- 0:11:17 Zusammenfassung
- 0:12:14 Iteratives Vorgehen
- 0:18:27 Singularitäten
- 0:19:13 Damped Least Squares
- 0:22:08 Stabilitätsbetrachtung
- 0:31:47 Wichtige Räume der Robotik
- 0:33:42 Zusammenfassung
- 0:33:46 Zusammenfassung: Kinematik
- 0:34:38 ZUsammenfassung: Verfahren
- 0:36:05 Dynamik
- 0:37:18 Überblick
- 0:37:54 Dynamisches Modell
- 0:38:09 Definition & Zweck
- 0:42:37 Allgemeines Modell
- 0:46:20 Generalisierte Koordinaten
- 0:51:37 Allgemein
- 0:55:03 Bewegungsgleichung
- 0:57:19 Direktes dynamisches Problem
- 1:00:03 Inverses dynamisches Problem
- 1:03:51 Modellierung der Dynamik
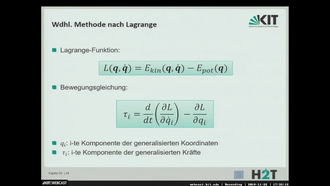
- 1:05:14 Methode nach Lagrange
- 1:07:03 Vorgehen
- 1:07:26 3D-Pendel
- 1:11:01 Zwei Drehgelenke
- 1:16:50 Beispiel mit Lineargelenk
- 1:20:15 Zusammenfassung
Laufzeit (hh:mm:ss)
01:21:40
Serie
Robotik I - Einführung in die Robotik, Vorlesung, WS 2018/19
Publiziert am
20.11.2018
Fachgebiet
Lizenz
Aufrufe
277
| Auflösung | 1280 x 720 Pixel |
| Seitenverhältnis | 16:9 |
| Audiobitrate | 128000 bps |
| Audio Kanäle | 2 |
| Audio Codec | aac |
| Audio Abtastrate | 48000 Hz |
| Gesamtbitrate | 934091 bps |
| Farbraum | yuv420p |
| Container | mov,mp4,m4a,3gp,3g2,mj2 |
| Medientyp | video/mp4 |
| Dauer | 4900 s |
| Dateiname | DIVA-2018-858_hd.mp4 |
| Dateigröße | 572.143.463 byte |
| Bildwiederholfrequenz | 25 |
| Videobitrate | 800059 bps |
| Video Codec | h264 |
Mediathek-URL
Embed-Code