14: Robotik I - Einführung in die Robotik, Vorlesung, WS 2018/19, 03.12.2018
Autor
Tamim Asfour, Peter Kaiser, Fabian Paus, Jonas Beil
Herausgeber
Beteiligtes Institut
Institut für Anthropomatik und Robotik (IAR)
Genre
Beschreibung
- 0:00:00 Start
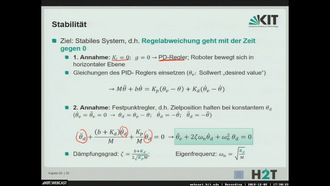
- 0:00:08 Stabilität
- 0:01:52 Regelung von Manipulatoren
- 0:02:04 Gelenkrergelung: Kaskadenregelung
- 0:03:13 Regelung im kartesischen Raum
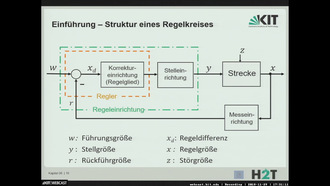
- 0:04:26 Struktur einer Roboterregelung
- 0:05:33 Regelungskonzepte für Manipulatoren
- 0:07:19 Kraft-Positionsregelung
- 0:09:42 Hybride Kraft-/Positionsregelung
- 0:18:48 Impedanz-Regelung
- 0:24:28 Regelung bei ARMAR
- 0:26:09 Ausführung von Manipulationsaufgaben
- 0:30:50 Sensoren
- 0:31:57 Positionsbasiertes Visual Servoing
- 0:36:56 Sensorbasierte Ausführung von Manipulationsaufagaben
- 0:41:33 Zweiarmige Manipulation
- 0:42:44 Nachgiebig Gekoppelte Manipulation
- 0:44:30 Englische Begriffe
- 0:46:38 Grundlagender Bahnsteuerung
- 0:50:56 Bahnsteuerung: Beispiel für ein Gelenk
- 0:52:45 Bahnsteuerung: Darstellung der Zustände
- 1:00:05 Bahnsteuerung: Interpolation
- 1:01:48 Bahnsteuerung im Konfigurationsraum
- 1:05:01 Bahnsteuerung im Arbeitsraum
- 1:06:12 Bahnsteuerung: Vor- und Nachteile der Darstellung
- 1:09:12 Direkte Programmierung: Teach-In
- 1:12:53 Direkte Programmierung: Playback
- 1:18:34 Interpolationsarten
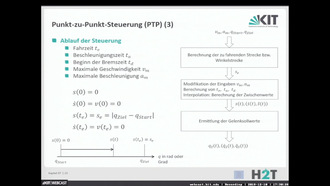
- 1:21:43 Punkt-zu-Punkt-Steuerung
- 1:25:24 PTP mit Rahmenprofil
- 1:31:01 Zeitoptimale Bahn
Laufzeit (hh:mm:ss)
01:31:34
Serie
Robotik I - Einführung in die Robotik, Vorlesung, WS 2018/19
Publiziert am
04.12.2018
Fachgebiet
Lizenz
Aufrufe
236
| Auflösung | 1280 x 720 Pixel |
| Seitenverhältnis | 16:9 |
| Audiobitrate | 128000 bps |
| Audio Kanäle | 2 |
| Audio Codec | aac |
| Audio Abtastrate | 48000 Hz |
| Gesamtbitrate | 934036 bps |
| Farbraum | yuv420p |
| Container | mov,mp4,m4a,3gp,3g2,mj2 |
| Medientyp | video/mp4 |
| Dauer | 5494 s |
| Dateiname | DIVA-2018-934_hd.mp4 |
| Dateigröße | 641.403.536 byte |
| Bildwiederholfrequenz | 25 |
| Videobitrate | 799935 bps |
| Video Codec | h264 |
Mediathek-URL
Embed-Code