11: Robotik I - Einführung in die Robotik, Vorlesung, WS 2018/19, 22.11.2018
Author
Tamim Asfour, Peter Kaiser, Fabian Paus, Jonas Beil
Editor
Participating institute
Institut für Anthropomatik und Robotik (IAR)
Genre
Description
- 0:00:00 Start
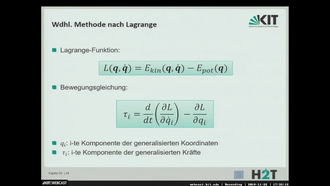
- 0:00:07 Wdhl. Methode nach Lagrange
- 0:02:53 Methode nach Lagrange: Zusammenfassung
- 0:06:10 Methode nach Newton-Euler
- 0:07:11 Methode nach Newton-Euler: Grundprinzip
- 0:09:06 Methode nach Newton-Euler: Verkettung
- 0:13:10 Methode nach Newton-Euler: Vorwärtsgleichungen
- 0:18:47 Methode nach Newton-Euler: Rückwärtsgleichungen
- 0:26:42 Methode nach Newton-Euler: Zusammenfassung
- 0:28:56 Methode nach Newton-Euler: Eigenschaften
- 0:31:10 Herausforderungen (Dynamik)
- 0:35:39 Lernen von Kinematik (und Dynamik)
- 0:42:39 Reglung von Robotersystemen
- 0:44:31 Reglungstechnik
- 0:46:01 Aufbau und Wirkungsweise einer Regelung
- 0:48:37 Aufbau einer Regelung
- 0:55:53 Wirkungsweise der Regelung
- 0:58:34 Definition: Regelung
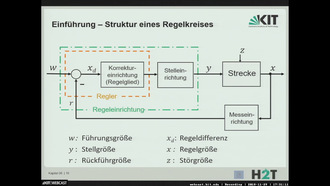
- 1:08:56 Einführung - Regelkreis
- 1:11:50 Grundlagen der Regelung
- 1:12:19 Laplace- Transformation
Duration (hh:mm:ss)
01:21:53
Series
Robotik I - Einführung in die Robotik, Vorlesung, WS 2018/19
Published on
26.11.2018
Subject area
License
| Resolution | 1280 x 720 Pixel |
| Aspect ratio | 16:9 |
| Audio bitrate | 128000 bps |
| Audio channels | 2 |
| Audio Codec | aac |
| Audio Sample Rate | 48000 Hz |
| Total Bitrate | 934048 bps |
| Color Space | yuv420p |
| Container | mov,mp4,m4a,3gp,3g2,mj2 |
| Media Type | video/mp4 |
| Duration | 4913 s |
| Filename | DIVA-2018-884_hd.mp4 |
| File Size | 573.651.191 byte |
| Frame Rate | 25 |
| Video Bitrate | 799948 bps |
| Video Codec | h264 |
Media URL
Embed Code