21: Robotik I - Einführung in die Robotik, Vorlesung, WS 2018/19, 10.01.2019
Author
Tamim Asfour, Peter Kaiser, Fabian Paus, Jonas Beil
Editor
Participating institute
Institut für Anthropomatik und Robotik (IAR)
Genre
Description
- 0:00:00 Start
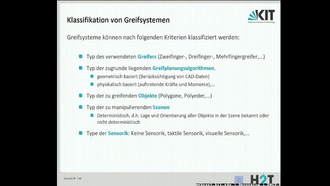
- 0:00:05 Klassifikation von Greifsystemen
- 0:03:26 Suchraum beim Greifen
- 0:05:40 Objektklassen für das Greifen
- 0:11:38 Algorithmen zur Griffsynthese
- 0:15:14 Definition eines Griffes
- 0:18:46 Griffsynthese durch Vorwärtsplanung
- 0:22:41 Griffqualität (Kraftschluss-Metrik)
- 0:24:06 Grasp Wrench Space
- 0:26:16 ZUfallsbasierte Vorwärts-Greifplanung
- 0:33:20 Griffsynthese auf Objektteilen
- 0:37:17 Greifplanung mit Formprimitiven
- 0:40:08 Greifen bekannter Objekte: Ein Box-basierter Ansatz
- 0:42:54 Decomposition Algorithm: from points to boxes
- 0:47:06 Erzeugen von Griffhypothesen: Von Boxen zu Griffen
- 0:48:40 Evaluation
- 0:55:53 Dekompositionsalgorithmus: Ergebnisse
- 0:56:32 Greifplanung mit Superquadriken
- 1:00:12 Griffplanung mit medialen Achsen
- 1:08:14 Analyse der Querschnitte der medialen Achse
- 1:10:53 Analyse der gefundenen Cluster
- 1:13:21 Heuristiken zur Erzeugung von Griffhypothesen
- 1:16:14 Ergebnisse: Qualität des Griffs (Kraftschluss)
- 1:17:45 Ergebnisse: Effizienz
- 1:19:53 Erweiterungen
- 1:21:37 ARMAR – Bekannte Objekte
- 1:24:30 Task Specific Grasping – Familiar Objects
- 1:27:42 Grasping unknown objects
Duration (hh:mm:ss)
01:30:20
Series
Robotik I - Einführung in die Robotik, Vorlesung, WS 2018/19
Published on
14.01.2019
Subject area
License
| Resolution | 1280 x 720 Pixel |
| Aspect ratio | 16:9 |
| Audio bitrate | 128000 bps |
| Audio channels | 2 |
| Audio Codec | aac |
| Audio Sample Rate | 48000 Hz |
| Total Bitrate | 934026 bps |
| Color Space | yuv420p |
| Container | mov,mp4,m4a,3gp,3g2,mj2 |
| Media Type | video/mp4 |
| Duration | 5420 s |
| Filename | DIVA-2019-31_hd.mp4 |
| File Size | 632.818.873 byte |
| Frame Rate | 25 |
| Video Bitrate | 799994 bps |
| Video Codec | h264 |
Media URL
Embed Code